Los ingenieros de la Universidad de Duke han desarrollado un robot totalmente blando, sin componentes electrónicos, con forma de libélula que puede deslizarse por el agua y reaccionar a las condiciones ambientales como el pH, la temperatura o la presencia de aceite. La demostración de prueba de principio podría ser el precursor de centinelas ambientales más avanzados, autónomos y de largo alcance para monitorear una amplia gama de posibles signos reveladores de problemas.
El robot blando se describe en línea el 25 de marzo en la revista Advanced Intelligent Systems .
Los robots blandos son una tendencia creciente en la industria debido a su versatilidad. Las piezas blandas pueden manipular objetos delicados, como tejidos biológicos, que podrían dañar los componentes metálicos o cerámicos. Los cuerpos blandos pueden ayudar a los robots a flotar o meterse en espacios reducidos donde los marcos rígidos se atascan.
El campo en expansión estaba en la mente de Shyni Varghese, profesor de ingeniería biomédica, ingeniería mecánica y ciencia de los materiales, y cirugía ortopédica en Duke, cuando llegó la inspiración.
«Recibí un correo electrónico de Shyni desde el aeropuerto diciendo que tenía una idea para un robot blando que usa un hidrogel autocurativo que su grupo ha inventado en el pasado para reaccionar y moverse de forma autónoma», dijo Vardhman Kumar, estudiante de doctorado en Varghese’s. laboratorio y primer autor del artículo. «Pero ese fue el alcance del correo electrónico, y no volví a saber de ella durante días. Así que la idea se quedó en el limbo por un tiempo hasta que tuve suficiente tiempo libre para seguirla, y Shyni dijo que lo hiciera. eso.»
En 2012, Varghese y su laboratorio crearon un hidrogel autocurativo que reacciona a los cambios de pH en cuestión de segundos. Ya sea una grieta en el hidrogel o dos piezas contiguas «pintadas» con él, un cambio de acidez hace que el hidrogel forme nuevos enlaces, que son completamente reversibles cuando el pH vuelve a sus niveles originales.
La idea escrita apresuradamente de Varghese fue encontrar una manera de usar este hidrogel en un robot blando que pudiera viajar a través del agua e indicar lugares donde cambia el pH. Junto con algunas otras innovaciones para señalar cambios en su entorno, pensó que su laboratorio podría diseñar un robot como una especie de sensor ambiental autónomo.
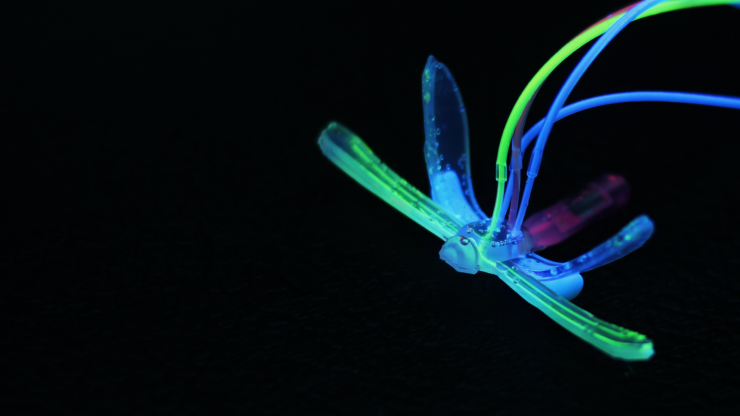
Con la ayuda de Ung Hyun Ko, un becario postdoctoral también en el laboratorio de Varghese, Kumar comenzó a diseñar un robot blando basado en una mosca. Después de varias iteraciones, la pareja se decidió por la forma de una libélula diseñada con una red de microcanales interiores que permiten controlarla con presión de aire.
Crearon el cuerpo, de aproximadamente 2.25 pulgadas de largo con una envergadura de 1.4 pulgadas, vertiendo silicona en un molde de aluminio y horneándolo. El equipo utilizó litografía suave para crear canales interiores y los conectó con tubos de silicona flexibles.
Nació DraBot
«Lograr que DraBot respondiera a los controles de presión de aire a largas distancias utilizando solo autoactuadores sin ningún sistema electrónico fue difícil», dijo Ko. «Esa fue definitivamente la parte más desafiante».
DraBot funciona controlando la presión del aire que entra en sus alas. Los microcanales llevan el aire a las alas delanteras, de donde escapa a través de una serie de orificios que apuntan directamente a las alas traseras. Si ambas alas traseras están hacia abajo, el flujo de aire está bloqueado y DraBot no va a ninguna parte. Pero si ambas alas están levantadas, DraBot avanza.
Para agregar un elemento de control, el equipo también diseñó actuadores de globo debajo de cada una de las alas traseras cerca del cuerpo de DraBot. Cuando se inflan, los globos hacen que las alas se doblen hacia arriba. Al cambiar qué alas están hacia arriba o hacia abajo, los investigadores le dicen a DraBot a dónde ir.
«Fuimos felices cuando pudimos controlar DraBot, pero se basa en seres vivos», dijo Kumar. «Y los seres vivos no solo se mueven por sí mismos, reaccionan a su entorno».
Ahí es donde entra el hidrogel autocurativo. Al pintar un par de alas con el hidrogel, los investigadores pudieron hacer que DraBot respondiera a los cambios en el pH del agua circundante. Si el agua se vuelve ácida, el alerón delantero de un lado se fusiona con el alerón trasero. En lugar de viajar en línea recta como se indica, el desequilibrio hace que el robot gire en círculo. Una vez que el pH vuelve a un nivel normal, el hidrogel se «deshace», las alas fusionadas se separan y DraBot vuelve a responder completamente a las órdenes.
Para reforzar su conciencia ambiental, los investigadores también aprovecharon las esponjas debajo de las alas y doparon las alas con materiales sensibles a la temperatura. Cuando DraBot roza el agua con aceite flotando en la superficie, las esponjas lo absorberán y cambiarán de color al color correspondiente del aceite. Y cuando el agua se calienta demasiado, las alas de DraBot cambian de rojo a amarillo.
Los investigadores creen que este tipo de mediciones podrían desempeñar un papel importante en un sensor robótico ambiental en el futuro. La capacidad de respuesta al pH puede detectar la acidificación del agua dulce, que es un problema ambiental grave que afecta a varias regiones geológicamente sensibles. La capacidad de absorber aceites hace que estos robots de desnatado de larga distancia sean un candidato ideal para la detección temprana de derrames de petróleo. El cambio de colores debido a las temperaturas podría ayudar a detectar signos de marea roja y el blanqueamiento de los arrecifes de coral, lo que conduce a la disminución de la población de vida acuática.
El equipo también ve muchas formas en que podrían mejorar su prueba de concepto. Las cámaras inalámbricas o los sensores de estado sólido podrían mejorar las capacidades de DraBot. Y crear una forma de propulsor a bordo ayudaría a bots similares a liberarse de sus tubos.
«En lugar de usar la presión del aire para controlar las alas, podría imaginar el uso de algún tipo de biología sintética que genere energía», dijo Varghese. «Ese es un campo totalmente diferente al que yo trabajo, así que tendremos que tener una conversación con algunos colaboradores potenciales para ver qué es posible. Pero eso es parte de la diversión de trabajar en un proyecto interdisciplinario como este».
Este trabajo se realizó principalmente en la instalación de Instrumentación y Materiales Compartidos (SMIF) en la Universidad de Duke, una instalación central respaldada por la Fundación Nacional de Ciencias (ECCS-1542015) como parte de la Infraestructura Nacional Coordinada de Nanotecnología (NNCI).
Fuente: la Universidad de Duke . Original escrito por Ken Kingery.

